Los barcos y la navegación:
La habilidad marinera de los fenicios era ampliamente conocida entre los pueblos vecinos y suscitó siempre una gran admiración o una fuerte envidia. En realidad, el dominio de los medios de navegación y el profundo conocimiento de los mares y de los elementos atmosféricos, junto con la costumbre de los tráficos marítimos, permitieron a este pueblo llegar a ser un ejemplo en el ámbito de la cuenca mediterránea. De aquí la fama que tenían de crueles piratas o hábiles comerciantes, de astutos o estafadores mercaderes o de grandes e intrépidos navegantes. Sea como fuere, los fenicios, animados por el deseo de adquirir fuentes cada vez más nuevas y remuneradas de aprovisionamiento de materias primas y de comerciar los productos propios elaborados en la madre patria, recorrieron enormes distancias, siendo los pioneros en trazar rutas hacia el Mediterráneo occidental y, más allá de las columnas de Hércules, hacia las costas atlánticas de África y de Europa, abriendo a la historia la cuenca occidental del Mediterráneo. Sobre la base de las antiguas fuentes escritas y con relación a los antiguos asentamientos, es posible argüir los diferentes sistemas de navegación en uso en aquella época. Se pueden reconocer, pues, dos tipos fundamentales: el primero, de pequeño cabotaje, se desarrollaba en el ámbito de la franja costera, con navegación a la vista de las costas y entre núcleos habitados próximos.
 Navegación en alta mar:
Navegación en alta mar:
El segundo, de largo recorrido, se enfrentaba con amplios trechos de mar abierto, lejos de las costas y se dirigía hacia lugares a menudo muy distantes del puerto de partida. Por lo que atañe a la navegación de pequeño cabotaje, ésta se efectuaba prevalentemente en las horas diurnas, en la proximidad de las costas y, por lo tanto, navegando a la vista, para unir los centros costeros separados entre sí no más de 25-30 millas náuticas. A este fin, junto a los barcos mercantiles de mayor tamaño, se utilizaban también embarcaciones de menor tonelaje, con relación al espejo de mar que había que atravesar y a la posible carga que había que transportar. Por otra parte, la navegación de largo recorrido tenía lugar especialmente en mar abierto, a una mayor distancia de las costas, pero probablemente siempre a la vista de la tierra, durante la noche. Cuando el trayecto no permitía paradas a la navegación, la nave se orientaba por la constelación de la Osa Mayor, conocida en el mundo antiguo con el nombre de Estrella Fenicia. En todo caso, cuando era posible y en estrecha dependencia de las condiciones atmosféricas, también la navegación de largo recorrido tenía que aprovechar las escalas temporales, necesarias para el aprovisionamiento de los géneros alimenticios y para posibles reparaciones del mismo barco. En las paradas nocturnas y caso del mal tiempo o de viento contrario, se escogían espejos de agua respaldados por promontorios o islas, mientras que, en lo tocante a las embarcaciones menores, éstas se llevaban a tierra fácilmente, cada vez que se presentaba la necesidad de hacerlo. Si se observa con atención un mapa geográfico del Mediterráneo, se puede constatar fácilmente que los trechos de mar en los que se tenía que navegar necesariamente, sin puntos de referencia en la costa, son muy raros en realidad. Pues, si se tiene presente que la velocidad de la flota comercial giraba en torno a los 2-3 nudos, se deduce que en un día se podían recorrer más de 50 millas marinas, que permitían llegar, salvo en algunas travesías de especial longitud, a la vista de las costas. Los trayectos más largos, que suponían navegar sin puntos de referencia en la costa, eran las travesías del canal de Cerdeña, desde las costas africanas a las de la isla, o la travesía del mar de las Baleares, desde las costas africanas a las islas Baleares, o de éstas a las costas occidentales de Cerdeña. Las restantes rutas que los fenicios solían recorrer podían hacerse costeando la tierra, como debía suceder durante las largas travesías de Oriente a Occidente y viceversa. Por lo que se refiere a la velocidad máxima del recorrido de un trecho de mar del que se tenía conocimiento cierto, el historiador Polibio nos transmite la noticia de cómo un capitán cartaginés, llamado Aníbal el Rodense, consiguió efectuar con un barco de guerra el trayecto entre Cartago y el cabo Lilibeo hasta la actual Marsala, equivalente a 125 millas marinas, en 24 horas con una media de más de 5 nudos por hora. La navegación comercial tenía lugar casi exclusivamente entre los meses de marzo y octubre, es decir, durante la temporada más benigna del año, y empezaba con especiales ceremonias, con la intención de propiciar los tráficos marítimos. La falta de vientos constantes, como los alisios en la cuenca del Mediterráneo, constituyó seguramente un problema no leve para los largos trayectos, con relación al tipo de velamen en uso en aquella época. Sin embargo, la inconstancia de los vientos mediterráneos y su orientación tan variable, aunque a veces impusieron paradas de varios días de duración, también permitieron que el tráfico comercial se desarrollara en todas direcciones, sin necesidad de que hubiera temporadas de espera o de que se dieran giros acaso viciosos o excesivamente largos.
|
 La navegación de las embarcaciones de guerra, por el contrario, tenía lugar durante todo el año, por la necesidad de patrullar las costas y para la posible represión de la piratería; o bien, en el caso de acontecimientos bélicos en curso, para las oportunas operaciones militares. Estas eventualidades, condicionadas por la intemperie, fueron muchas veces fatales si se considera que, por ejemplo, durante el desenvolvimiento de la primera guerra púnica entre Cartago y Roma, las pérdidas de la flota comercial -incluyendo barcos para el transporte de las tropas y de los aprovisionamientos, y los barcos de línea- causadas por las tempestades y por los consiguientes naufragios atribuibles a los cartagineses, sumaron cerca de 700 unidades; mientras que las pérdidas de las flotas romanas superaron incluso el millar.
La navegación de las embarcaciones de guerra, por el contrario, tenía lugar durante todo el año, por la necesidad de patrullar las costas y para la posible represión de la piratería; o bien, en el caso de acontecimientos bélicos en curso, para las oportunas operaciones militares. Estas eventualidades, condicionadas por la intemperie, fueron muchas veces fatales si se considera que, por ejemplo, durante el desenvolvimiento de la primera guerra púnica entre Cartago y Roma, las pérdidas de la flota comercial -incluyendo barcos para el transporte de las tropas y de los aprovisionamientos, y los barcos de línea- causadas por las tempestades y por los consiguientes naufragios atribuibles a los cartagineses, sumaron cerca de 700 unidades; mientras que las pérdidas de las flotas romanas superaron incluso el millar. Expediciones marítimas:
Gran resonancia tuvieron en la antigüedad los viajes de exploración con fines comerciales, efectuados por fenicios y cartagineses en búsqueda de metales preciosos o de nuevos y más remunerativos mercados. Entre éstos, merece ser recordado sin duda el que, según el historiador Heródoto, efectuaron los fenicios por encargo del faraón Necao hacia finales del siglo vn a.C. y que, habiendo durado cerca de tres años, los llevó a circunnavegar el continente africano de oriente a occidente, o bien, como narra un geógrafo griego, el viaje del cartaginés Hannón que, hacia finales del siglo V a.C., poniendo vela desde Cartago hacia el océano Atlántico, traspasó las columnas de Hércules, llegando hasta el golfo de Guinea. También vale la pena citar el viaje efectuado hacia el siglo y a.C., por el cartaginés Himilcón a lo largo de las costas atlánticas de Europa hasta alcanzar la Bretaña y, tal vez, las islas Casitérides (Gran Bretaña e Irlanda) en busca del estaño y en el intento de abrir una nueva vía comercial para este mineral, en alternativa a la vía continental que, a través de Francia, llegaba hasta el golfo de León y a Marsella. Algunos hallazgos arqueológicos atestiguan la presencia, aunque temporal, de los cartagineses en las islas Azores, mientras ulteriores noticias de antiguos autores cuentan viajes fabulosos efectuados por los fenicios en regiones del océano Atlántico.
Diseño de embarcaciones:
Para poder desarrollar sus actividades comerciales, los fenicios utilizaron barcos equipados adecuadamente para dichos fines, que explotaban todos los recursos puestos a disposición por la técnica de los astilleros de la época y que no estaban muy distantes de los criterios constructivos actualmente en uso. Ante todo hay que recordar los barcos de transporte, llamados gauloipor los antiguos autores, a causa de la redondez de su casco, que tenían una amplia capacidad de carga y poseían una anchura equivalente a la cuarta parte de la longitud. Los barcos de transporte fenicios tenían una longitud comprendida entre los veinte y los treinta metros y, por lo tanto, la anchura era de seis o siete metros; el calado era de un metro y medio aproximadamente, en analogía con la parte saliente del casco. Si las medidas ahora mencionadas corresponden a la mayor parte de la flota en uso, no hay que excluir los barcos mercantiles de mayores dimensiones. La popa era redondeada y culminaba con un friso de cola de pescado o en forma de viruta, así como la proa, también curvilínea, acababa en el aplustro, un friso zoomorfo representando la cabeza de un caballo. En el casco, a espaldas de la proa, estaban representados dos ojos, que, según la intención de cada caso, tenían que permitir al barco ver la ruta y tenían que causar terror a los enemigos. La propulsión de estos barcos estaba garantizada por la presencia del palo maestro que sostenía una vela rectangular, fija con una yerga que se orientaba según fuera la dirección del viento. La forma y la posición de la vela permitían al barco tan sólo unas andaduras con vientos provenientes de los cuadrantes de popa. El gobierno del barco estaba asegurado por el timón, un remo con las palas asimétricas muy amplias, que se sujetaba en el lado izquierdo, cerca de la popa. En el puente del barco, siempre hacia la parte de popa, surgía el castillo que ofrecía protección a la tripulación y contenía los aparejos además de la cocina de a bordo. La tripulación de estos buques raramente superaba los veinte hombres, incluyendo al capitán armador y al piloto, puesto que la navegación de vela no requería un número mayor de marineros. Pasando a considerar los barcos que componían la flota de guerra de los fenicios y de Cartago es preciso observar, ante todo, que estas embarcaciones eran más delgadas que la flotilla comercial. Pues, para poder albergar una tripulación más numerosa y para poder disponer en los bancos del mayor número posible de remeros, estos navíos tenían una anchura que correspondía casi a la séptima parte de su longitud. Mientras la popa era semejante a la de los barcos comerciales, la proa se apartaba bastante, puesto que constituía la parte más importante de la embarcación y el arma ofensiva durante las batallas. Era precisamente en la extremidad de la proa donde se colocaba el espolón, es decir, una punta de bronce de diferentes perfiles que se utilizaba para destrozar los costados de los barcos adversarios. A los lados de la proa estaban ubicados los acostumbrados ojos, encima de los cuales se hallaban los orificios por los que pasaban los cables de las anclas. En el puente, siempre hacia proa, estaba situado el castillo, una estructura de madera que durante los enfrentamientos albergaba a los arqueros o las catapultas; en popa estaba en cambio el puente, reparo y alojamiento del capitán y de los oficiales. El gobierno del barco estaba asegurado por dos timones colocados en los costados, cerca de la popa. La propulsión del barco de guerra era más compleja, puesto que en batalla eran indispensables las evoluciones y cambios bruscos de ruta para poder tocar al enemigo con el espolón y evitar los golpes asestados por la flota adversaria. Por lo tanto, en el puente se levantaban dos palos, uno colocado en el centro, que sostenía la gran vela maestra, y otro ubicado en la proa que enarbolaba una pequeña vela, la cual permitía gobernar el barco incluso con vientos transversales. Durante las batallas los barcos se desarbolaban y la propulsión de los mismos quedaba asegurada por los remeros. Estos se colocaban en el interior del casco, a lo largo de los costados del barco, y empuñaban los remos que salían por los orificios practicados en la tablazón. Junto a los barcos comerciales y de guerra, se conocen también embarcaciones menores, como los botes utilizados para recorridos de pequeño cabotaje o las barcas de pesca. La forma del casco era semejante a la de los barcos mercantiles, con una proporción análoga entre la longitud y la anchura. La popa, adornada con un friso, era redondeada, mientras que la proa era apiculada, llevando encima una viga. La propulsión dependía tanto de las velas, con un pequeño palo, como de los remos, mientras el gobierno se aseguraba mediante un timón situado a la izquierda de la popa. Siempre sobre el tema de la flota de guerra es preciso mencionar primeramente los tipos en uso entre el inicio de la historia de los fenicios y la caída de Cartago.
El barco más antiguo y más elemental era la pentecontera, cuyo nombre indica sus características más sobresalientes. La embarcación, en efecto, tenía una longitud que se calcula entre unos veinticinco metros y tenía una tripulación de cincuenta hombres en los remos, dispuestos en veinticinco por cada lado, además del capitán, el segundo, el piloto y los hombres encargados de la maniobra de las velas, que no superaban el número de diez. El ritmo del movimiento de los remos lo aseguraba un flautista. La reina del Mediterráneo, dueña indiscutible del mar, entre los siglos VII y IV a.C., fue la trirreme o triera, cuya invención los antiguos autores atribuyen a los navegantes fenicios. Esta embarcación albergaba una tripulación de unos ciento ochenta hombres, dispuestos en la siguiente forma: ochenta y cinco hombres por cada lado se aplicaban a los remos, mientras la parte restante constituía el personal consagrado al mando y a la maniobra del velamen, así como un pequeño contingente de infantería de desembarque, destinada al combate. La innovación fundamental de este barco fue el hecho de que los remeros, dada la longitud del casco, no superior a los treinta y seis metros, no estaban dispuestos en línea, sino superpuestos en tres filas desiguales, de manera que pudieran lograr un triple objetivo: no estorbar el movimiento de los remos de los marineros, no tener que levantar demasiado los costados del barco y contener su longitud. Los antiguos autores también atribuyen la sucesiva tetrera, en servicio en las flotas cartaginesas a partir del siglo IV a.C., a los astilleros de Cartago. La innovación de este barco, como la de la sucesiva pentera, clásico buque de línea durante las guerras púnicas, consistía en disponer de cuatro y, a continuación, de cinco remeros para cada remo y en un mismo banco. Tanto la tetrera como la pentera tenían una longitud de casi cuarenta metros y una anchura de poco más de seis, con una parte sumergida no superior a los dos metros. La máxima velocidad alcanzable por estos barcos -cuya tripulación era respectivamente de doscientos cuarenta y de trescientos hombres aplicados a los treinta remos por lado, además de aquellos destinados a la maniobra de las velas-, velocidad obtenida con el uso simultáneo de dos medios propulsores y únicamente para cortos trechos, era de cinco y de seis nudos. La velocidad de crucero, alcanzable con el uso de uno solo de los medios de propulsión era de casi la mitad de la máxima. La aproximación al teatro de la batalla se hacía con el exclusivo uso de la vela; en el momento de avistar al enemigo, se amainaban las velas y se quitaba el mástil y, cuando era posible, se dejaba en tierra para dejar libre el puente, a fin de que los combatientes pudieran moverse fácilmente en él.
Técnica de combate naval:
El orden de batalla y el enfrentamiento se efectuaba exclusivamente a fuerza de remos, para poder maniobrar el barco con mayor facilidad. De máximo interés es el constatar, a través de las antiguas fuentes, que mientras los ejércitos cartagineses estaban compuestos prevalentemente de mercenarios, reclutados a sueldo en las diferentes regiones del Mediterráneo, las tripulaciones de los barcos, en cambio, estaban constituidas exclusivamente por ciudadanos cartagineses. La consistencia de las flotas durante el enfrentamiento con Roma, era de varias escuadras de doce barcos y podía llegar normalmente a formar flotas de ciento veinte barcos y, en casos especiales, de más de trescientos. Las tácticas de las batallas navales de escuadra eran principalmente dos: la primera, conocida con el nombre de diecplus, consistía en una salida simultánea y velocísima de toda la flota dispuesta en línea, en atravesar la línea enemiga por los espacios existentes entre los barcos, en el repentino viraje a espaldas del adversario y en el asestar un golpe definitivo, con el espolón, en la popa de los barcos enemigos. La segunda táctica, definida periplus, consistía en colocarse al lado del barco enemigo y asestarle un golpe con el espolón contra el costado. Cuando un barco enemigo no quedaba irremediablemente afectado era arrastrado hasta tierra firme para efectuar su reparación y poder utilizarlo de nuevo.
En cuanto a la carpintería y a las técnicas de construcción de aquel tiempo, ha sido de gran ayuda, para su mejor conocimiento, el descubrir en un espejo de mar poco al norte de Marsala, dos barcos púnicos del siglo III a.C. Los barcos, en discreto estado de conservación teniendo en cuenta su larga permanencia en agua, han sido clasificados por los autores del hallazgo como barcos de guerra, pero la ausencia del espolón, de por sí tan significativa, y su escasa longitud, no superior a los treinta metros, permiten atribuir a las dos embarcaciones una función más bien de avisos-repuestos, no destinados a las operaciones bélicas sino a funciones de enlace. En todo caso, lo que sigue siendo de importancia fundamental es la técnica utilizada en su construcción. En efecto, ha sido posible observar que ambos barcos estaban construidos en su totalidad, con piezas de madera prefabricadas separadamente y montadas sólo en un segundo tiempo. Esto se deduce en base a la presencia en los bordes de cada pieza de unas letras del alfabeto púnico y de líneas de guía que debían servir de referencia a los carpinteros. Este descubrimiento contribuye también a aclarar el famoso episodio descrito por Plinio (Nat. Hist., XVI, 92) en que se cuenta cómo la primera flota romana fue construida tan sólo en sesenta días. En realidad, el historiador Polibio cuenta lo siguiente: "En esta ocasión, los cartagineses habían asaltado (a los romanos) en el estrecho (de Mesina) y un barco cubierto, habiendo avanzado demasiado en su afán de combatir, se había embarrancado y había caído en manos de los romanos; de este barco se sirvieron para construir toda la flota". Es bastante evidente que, si para la construcción del barco de guerra cartaginés se habían utilizado los sistemas descritos arriba, el subsiguiente desmontaje había revelado su procedimiento y había permitido a los carpinteros romanos preparar la flota en muy breve tiempo. Por otra parte, siendo innegable la supremacía de las flotas cartaginesas en este período, es lógico que se tomaran como prototipos los barcos que, en aquel tiempo, constituían la suma de las técnicas navales, de la funcionalidad y de la manejabilidad, en toda la cuenca occidental del Mediterráneo. En conclusión, la estructura de los antiguos barcos fenicios y púnicos y los elementos que componían su casco, por lo menos en base a lo que se puede deducir de los restos de embarcaciones arriba citados, era bastante parecida a las actuales barcas de pesca de los países ribereños del Mediterráneo. Se trata de un complejo de tablas colocadas a cuchillo o parcialmente superpuestas -la tablazón- que va sujeto interiormente por un esqueleto de vigas -las ordenadas- ortogonales a la quilla. Además subsisten trazas de un recubrimiento externo que protegía la tablazón, formado por planchas de plomo embreado interiormente con pez y fijadas al casco con clavos de cobre.
(Fuente: http://www.mgar.net/var/fenicia.htm)

El influjo colonial por parte de comerciantes fenicios que dio lugar a la aparición de la cultura ibérica, encuentra un testimonio único a nivel mundial en dos barcos fenicios fechables en el s. VII a.C. y hundidos frente a la Playa de La Isla. El primero de los barcos, el conocido como Mazarrón 1, fue descubierto en 1988. La excavación subacuática de la primera de las naves fenicias se realizó entre los años 1993 y 1995 y la llevó a cabo el equipo del Museo Nacional de Arqueología Marítima y Centro Nacional de Investigaciones Arqueológicas Submarinas, dependiente del Ministerio de Cultura. El segundo de los barcos fenicios de la playa de la Isla, el denominado Mazarrón 2, fue excavado por el mismo equipo técnico. Se trata del barco más antiguo conocido y completo que haya sido excavado en el fondo del mar. La excavación arqueológica de esta segunda nave se realizó entre los años 1999 y 2000. El barco, que está casi completo y conservado in situ frente a la Playa de la Isla, contaba con la totalidad del cargamento, constituido fundamentalmente por lingotes de mineral de plomo. También se localizó el ancla que es la más antigua de su tipo aparecida hasta la fecha en el Mediterráneo.
|

Actualmente no se encuentra visible, y está protegido con una estructura como medida de protección.
|





















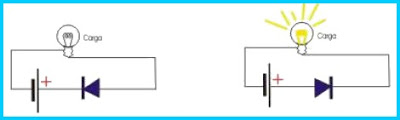
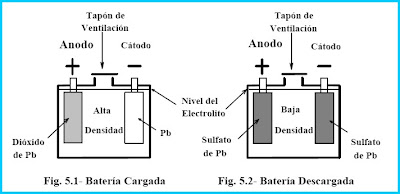
 El problema más grande con los diodos es la perdida o 'caída de tensión' que se produce en ellos. Efectivamente; Si a los 14,2 voltios que entrega el alternador del motor le restamos los 0,6 voltios que se pierden en el diodo a la batería le llegarán 14,2 - 06 = 13,6 voltios. Desgraciadamente 13,6 voltios son insuficientes para cargar al máximo y de forma completa las baterías de última generación.
El problema más grande con los diodos es la perdida o 'caída de tensión' que se produce en ellos. Efectivamente; Si a los 14,2 voltios que entrega el alternador del motor le restamos los 0,6 voltios que se pierden en el diodo a la batería le llegarán 14,2 - 06 = 13,6 voltios. Desgraciadamente 13,6 voltios son insuficientes para cargar al máximo y de forma completa las baterías de última generación.